Jan Vidar Grindheims doktorgradsarbeid omfatter forbedrede algoritmer for modellering, posisjonering og styring av seismiske streamere, som benyttes for leting etter petroleum.
I fleire tiår har ein nytta offshore seismiske survey til leiting etter petroleum. For å møte aukande krav til effektivitet og datakvalitet har teknologi og utstyr gradvis forbetra seg. Moderne seismiske survey vert utført ved å taue mange kablar bak eit fartøy. Kablane har typisk 4-12 km lengd, med kabelseparasjon ned til 25 m. Ved faste intervall genererer ein lydbølgjer ved å fyre av sourcane, som er plassert framfor kablane. Kablane har mangfaldige trykksensorar installert, som tek opp lydbylgjer reflektert frå havbunnslaga. Innsamla data nyttast for å produsere bilete av lokale hydrokarbonstrukturar.
For å halde konstant kabeldjupn, har ein nytta dybdestyring med vingar i lang tid. I dag vert styrekomponentar med vingar, kalla birdar, nytta. Desse kan styre kablane både i dybde og lateralt og er normalt installert med om lag 300 m mellomrom langs kvar kabel. Lateral styring er viktig for å unngå kollisjon mellom kablane, og for kabelstyring ved 4D survey, der intensjonen er å fylgje kabelposisjonar frå historiske survey. Survey vert som regel utført linje for linje, noko som krev ein 180° sving av heile kabelutlegget mellom kvar linje. Dette er ein tidkrevjande manøver. Effektiv kabelstyring er særskilt viktig på linjeskift for å sikre kabelseparasjon og unngå kabelkollisjonar.
Ein kabelsimulator er utvikla for seismiske kablar. Implementeringa inkluderer mellom anna styringsbirdar, halebøye og komponentar installert på kabelen. Algoritmen er i 3D og inkluderer kabelstrekk og tensjon. Implementeringa er validert mot publiserte simuleringsresultat, kommersiell programvare og fullskaladata.
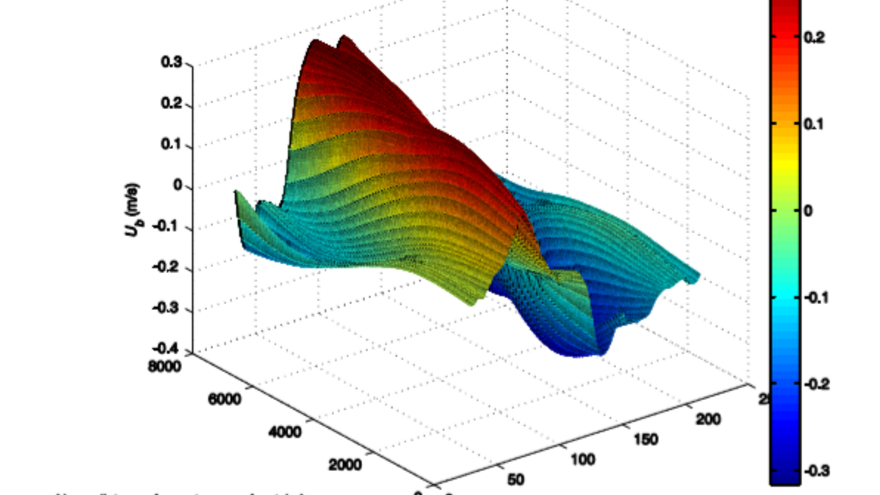
Eit utval av navigasjonsalgoritmar vart implementert med forskjellige kabelmodellar. Algoritmane vart samanlikna med estimering og prediksjon på fullskaladata. Vidare vart ein algoritme for estimering av havstraum basert på kabeldynamikk utvikla og validert. Ein arbeidde også med reduksjon av tid på linjeskift. Ein autopilotalgoritme vart utvikla basert på simulering, der intensjonen var å utnytte gunstige havstraumar.
Tradisjonelle styringsalgoritmar kan forbetrast, men dette krev modellering av kabeldynamikk samt estimering av havstraum og andre parametrar. Kabelmodellering er dessutan viktig for navigasjonssystem, der ein tradisjonelt nyttar forenkla modellar. Ved å nytte forbetra kabelmodellar kan ein utvikle meir nøyaktige og robuste navigasjonssystem. Basert på dette kan eit nøkkelbidrag frå denne avhandlinga vere forbetra kabelmodellar og havstraumsestimatorar som kan nyttast i sanntids navigasjons-, prediksjons- og styringssystem ombord på fartøy.
Det vert konkludert med at ved å forbetre modellering av kabelutlegget kan ein oppnå meir nøyaktige navigasjons- og styringsalgoritmar, og parametrar kan estimerast med betre grannsemd. Dette kan resultere i fordelar som forbetra datakvalitet og -grannsemd, redusert datakostnad, redusert operasjonsrisiko og redusert miljøbelastning. Ei utfordring har vore mangel på datakraft for å handtere meir sofistikerte modellar i sanntidssystem ombord på fartøy, men dette vert mindre utfordrande ettersom tilgjengeleg datakraft stadig aukar.