Ya Xiong sin doktorgradsavhandling tar sikte på å bidra med kunnskap om automatisering og robotisering av applikasjoner innen livsvitenskap. Avhandlingen er todelt, og tar for seg design, utvikling, styring og integrering av robotsystemer for prøvetaking og jordbærhøsting.
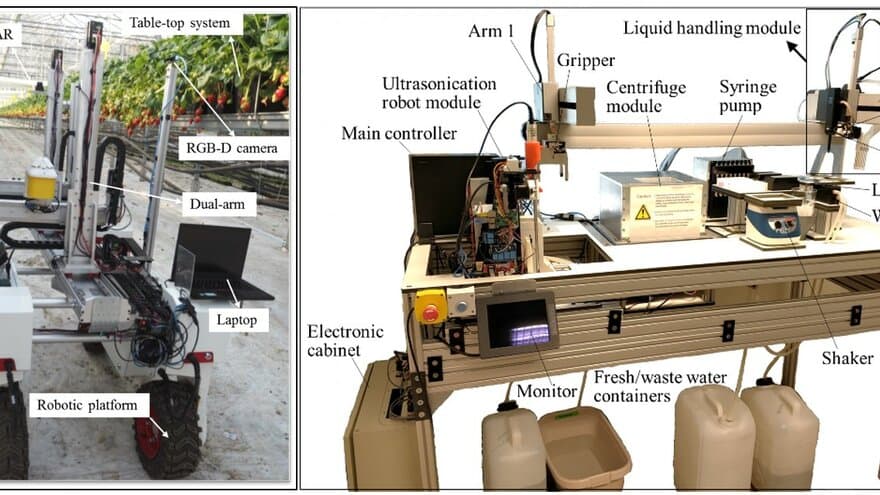
Del I omhandler utvikling av robotsystemer til bruk under forberedelse av sopprøver for Fourier-transform infrarød (FTIR) spektroskopi. I første stadium av denne delen ble det utviklet en helautomatisert robot for homogenisering av sopprøver ved bruk av ultralyd-sonikering. Plattformen ble konstruert ved å modifisere en billig 3D-printer og utstyre den med et kamera for å kunne skille prøvebrønner fra kontrollbrønner. Maskinsyn ble også tatt i bruk for å estimere soppens homogeniseringsprosess ved hjelp av matematisk modellering, noe som viste at homogenitetsnivået faller eksponensielt med tiden. Videre ble det foreslått en strategi for regulering i lukker sløyfe som brukte standardavviket for lokale homogenitetsverdier til å bestemme avslutningstidspunkt for sonikeringen. I neste stadium ble den første plattformen videreutviklet til en helautomatisert robot for hele prosessen som forbereder prøver av sopprøver for FTIR-spektroskopi. Dette ble gjort ved å legge til en nyutviklet sentrifuge- og væskehåndteringsmodul for vasking, konsentrering og spotting av prøver. Det nye systemet brukte maskinsyn med dyp læring for å identifisere innstillingene for laboratorieutstyr, noe som gjør at brukerne slipper å registrere innstillingene manuelt.
Del II av avhandlingen tar for seg robotisert høsting av jordbær. Denne delen kan videre deles inn i tre stadier. i) I det første stadiet ble det designet en ny kabeldrevet griper med sensorer som gir den høy toleranse for posisjonsfeil, og som kan redusere plukketiden ved å oppbevare bærene i en beholder. Griperens fingre danner et lukket rom som kan åpnes for å omslutte et bær og deretter lukkes for å kutte av stilken. Griperen er utstyrt med interne sensorer, og er i stand til å kontrollere en robotarm slik at den korrigerer for posisjonsfeil som skyldes unøyaktigheter i maskinsynet, noe som forbedrer robustheten. Sammen med den integrerte fargebaserte deteksjonsmetoden utgjør griperen et komplett system for jordbærhøsting. ii) I andre stadium ble det introdusert forbedringer og oppdateringer av det første stadiet, der hovedfokuset var å møte utfordringene i ustrukturerte omgivelser ved å introdusere en metode for maskinsyn som kunne tilpasse seg lysforholdene, og å innføre en ny algoritme for manipulasjon. På dette stadiet var det nye helintegrerte jordbærhøstingssystemet med dobbeltmanipulator i stand til å plukke jordbær kontinuerlig i polytunneler. Det viktigste vitenskapelige bidraget her er den nye algoritmen for baneplanlegging som dytter vekk hindringer, som er grunnleggende forskjellig fra tradisjonell baneplanlegging der hindringer vanligvis unngås. Algoritmen bruker griperen til å skyve de omkringliggende hindringene til side, slik at griperen får fri tilgang til målet, altså jordbæret som skal plukkes. Det ble også gjort forbedringer av griperen, armen og kontrollsystemet. iii) I tredje stadium ble metoden forbedret ved å introdusere et horisontalt og vertikalt sikksakk-dytt samt en ny trekkebevegelse for å skille ovenforliggende hindringer fra målet. Sikksakk-dyttet kan hjelpe griperen med å nå fram til målet, siden vibrasjonene som genereres kan skille bæret fra hindringene. Trekkoperasjonen kan løse problemet med at griperen feilaktig treffer hindringer som er plassert over målet, ved at griperen trekker målet til et sted med færre hindringer og deretter skyver det tilbake for å flytte hindringene til side. Separasjonsveiene bestemmes av antall og posisjonen til hindringer basert på den nedskalerte punktskyen i det aktuelle området.